技術交(jiao)流
示(shi)波器可(ke)通過各(ge)種各樣(yang)的視圖(tu)模式來(lai)觀察波(bo)形👩🏼❤️👨🏾,有YT、XY兩(liang)🏊🏾♀️大類别(bie),YT模式又(you)可以進(jin)一步細(xi)分爲普(pu)通、大時(shi)基、滾動(dong)等🧑🏻❤️🧑🏼模式(shi),觀察信(xin)号👧🏾時,應(ying)選擇哪(na)一種模(mo)式才最(zui)合适,不(bu)同的模(mo)式之間(jian)又有什(shi)麽關ˇ聯(lian)。本文帶(dai)您🚶🏾♀️➡️詳細(xi)深入👋探(tan)讨,各個(ge)模式顯(xian)示的方(fang)式,優點(dian)與缺點(dian),幫您快(kuai)速準确(que)地找到(dao)合适的(de)模式來(lai)觀察信(xin)号。
YT模(mo)式
YT模(mo)式是示(shi)波器中(zhong)最常見(jian)的,其坐(zuo)标系Y軸(zhou)爲通道(dao)輸入信(xin)号,上正(zheng)下負,參(can)考地爲(wei)零點,X軸(zhou)爲時間(jian),左負右(you)正,觸發(fa)點爲零(ling)🔞點。YT模式(shi)還可進(jin)一步細(xi)分爲普(pu)通、大時(shi)基、滾🔞動(dong)、Zoom、插值模(mo)式,下面(mian)一一詳(xiang)細介紹(shao)。
1、普通(tong)模式
普通模(mo)式是最(zui)常見,示(shi)波器一(yi)般工作(zuo)在此模(mo)式下,其(qi)👨🦰特點如(ru)👩🏽🐰👩🏿下:采樣(yang)是分次(ci)且獨立(li)的,采樣(yang)之間存(cun)在🙆🏿死區(qu),可設置(zhi)觸發條(tiao)件,波形(xing)在采樣(yang)完成後(hou)輸出,對(dui)于周期(qi)信号一(yi)般可以(yi)~穩定顯(xian)🤶🏾示。
優(you)點:适用(yong)于觀察(cha)周期性(xing)信号,眼(yan)圖,低概(gai)率的異(yi)常信号(hao),可對數(shu)據進行(hang)強大的(de)處理,如(ru)測量、搜(sou)索、解碼(ma)等如圖(tu)1.1所示。
缺點:采(cai)樣之間(jian)有死區(qu),會丢失(shi)一定的(de)數據,有(you)時可能(neng)是緻👩🏽🐰👩🏿命(ming)的。當水(shui)平時基(ji)較大時(shi),波形刷(shua)新較慢(man),因爲采(cai)樣時間(jian)變長了(le)。
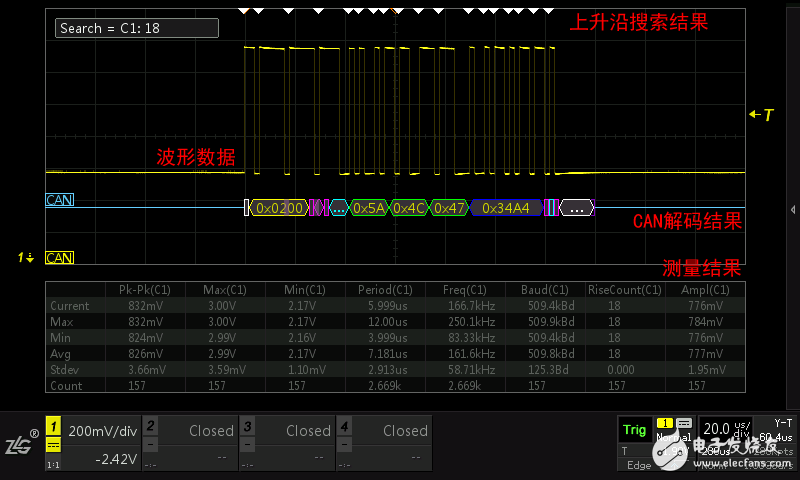
圖(tu)1.1
2、大時(shi)基模式(shi)
大時(shi)基模式(shi)與普通(tong)模式大(da)同小異(yi),區别僅(jin)在于波(bo)形在觸(chu)發後開(kai)始輸出(chu),在結束(shu)前邊采(cai)樣邊輸(shu)出。此模(mo)式繼承(cheng)🤑了普通(tong)模式的(de)👼🏾所有優(you)點,且改(gai)善了水(shui)平時基(ji)較大時(shi),波形輸(shu)出太慢(man)的缺點(dian),故被稱(cheng)爲大時(shi)基模式(shi)。
小提(ti)示:當時(shi)基較小(xiao),邊采樣(yang)邊輸出(chu)是沒有(you)意義的(de),因爲人(ren)眼👹跟😍不(bu)上刷新(xin)的速度(du),所以普(pu)通模式(shi)和大時(shi)基模式(shi)一般會(hui)根據水(shui)平時基(ji)自動切(qie)換。如ZDS2000系(xi)列😺示波(bo)器在水(shui)平時基(ji)大于等(deng)于100ms/div時,會(hui)自動進(jin)入大時(shi)基模式(shi)如🏊🏾♀️圖1.2所(suo)示。
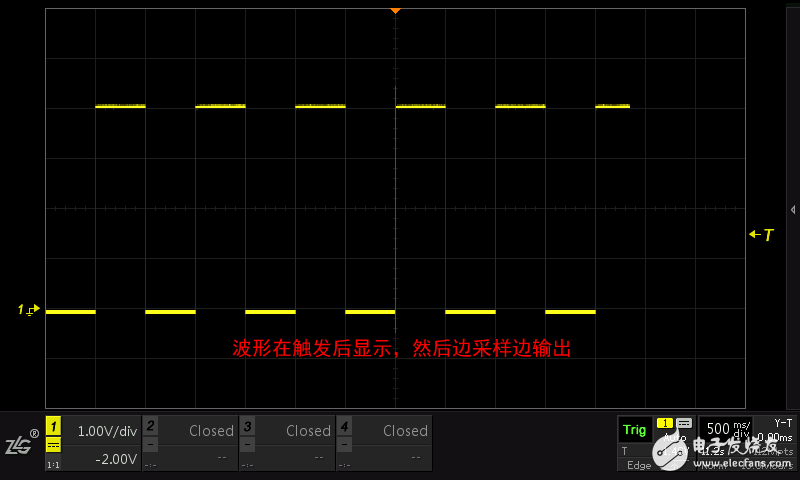
圖1.2
爲(wei)了更好(hao)展示地(di)邊采樣(yang)邊輸出(chu),大時基(ji)模式還(hai)提🧑🏽🎄供了(le)與上🙉一(yi)幀數據(ju)對比刷(shua)新,讓您(nin)更好地(di)觀察輸(shu)入信号(hao)的變化(hua)如圖1.3所(suo)示。
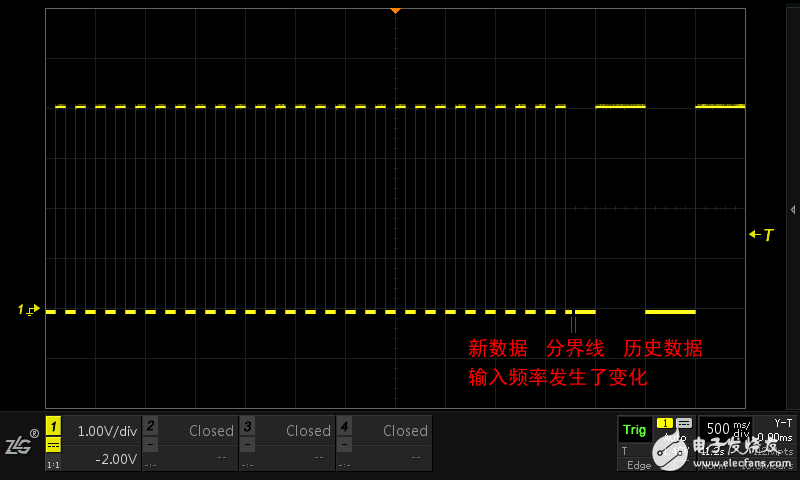
圖1.3
3、滾(gun)動模式(shi)
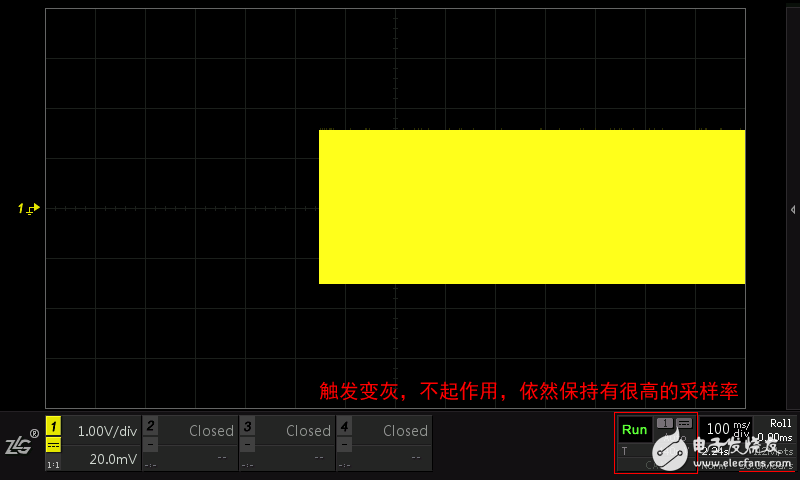
滾動(dong)模式的(de)特點如(ru)下:連續(xu)采樣,無(wu)采樣間(jian)隔,邊采(cai)樣邊😝顯(xian)👿示,無觸(chu)發設置(zhi),波形始(shi)終從右(you)往左滾(gun)動顯示(shi)如圖1.4所(suo)示。
優(you)點:采樣(yang)無死區(qu),且實時(shi)顯示,不(bu)會丢失(shi)數據。但(dan)應注意(yi)到,采👌樣(yang)率過低(di)也會導(dao)緻采到(dao)的數據(ju)沒有意(yi)👯🏾♂️義,所😸以(yi)選擇深(shen)存儲示(shi)波🏃🏿♀️➡️器是(shi)至關重(zhong)要的如(ru)圖1.5所示(shi),深存儲(chu)波形不(bu)失真,完(wan)美重建(jian)。
缺點(dian):波形無(wu)法穩定(ding)顯示,沒(mei)有觸發(fa)的概念(nian),不能自(zi)動😝識别(bie)低概率(lü)信号。
小提示(shi):爲什麽(me)滾動模(mo)式下,波(bo)形是從(cong)右往左(zuo)滾動顯(xian)示的呢(ne)?因爲YT模(mo)式定義(yi)的時間(jian)軸是左(zuo)負右正(zheng)(左側爲(wei)舊數👩🍼據(ju)右側爲(wei)新數據(ju)),那麽新(xin)采集的(de)數據必(bi)然是從(cong)右側增(zeng)加,舊的(de)數據則(ze)👋從左側(ce)🙂↕️移出屏(ping)外,所以(yi)就形成(cheng)了從右(you)往🙈左滾(gun)動顯示(shi)。
圖(tu)1.4
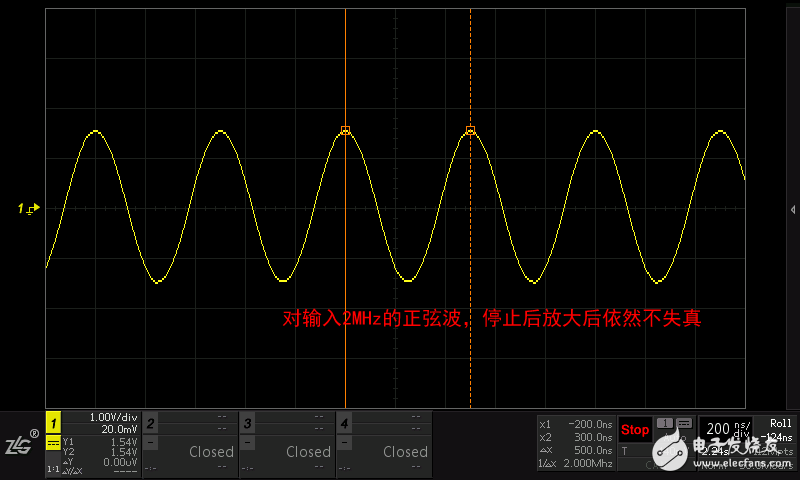
圖1.5
4、Zoom模式
Zoom模式是(shi)爲了解(jie)決水平(ping)時基過(guo)大而導(dao)緻波形(xing)顯示趨(qu)于密😈集(ji)的問題(ti),該模式(shi)提供另(ling)一個副(fu)時基窗(chuang)口,可查(cha)⛹🏻♀️看主😮💨時(shi)基局部(bu)放大的(de)波形,以(yi)方便用(yong)戶浏覽(lan)細節如(ru)圖1.6。
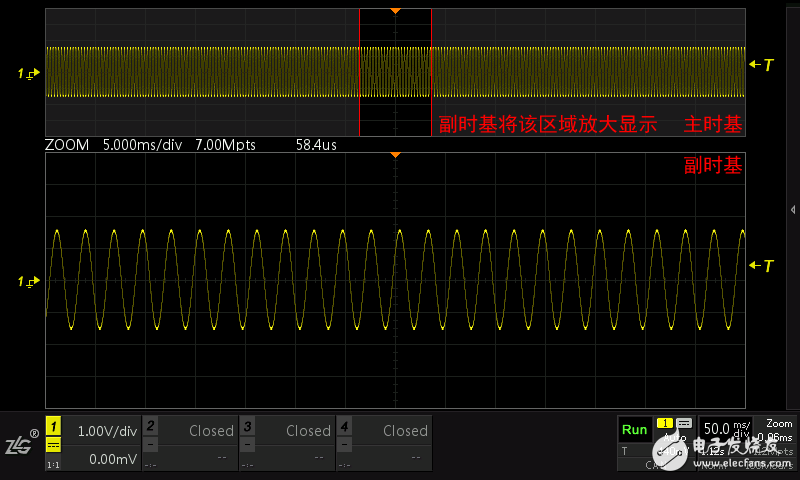
圖1.6
5、插(cha)值模式(shi)
插值(zhi)模式在(zai)當屏幕(mu)點數小(xiao)于分辨(bian)率時的(de)特殊模(mo)式。由于(yu)兩個原(yuan)始采樣(yang)點間存(cun)在很大(da)的空隙(xi),通常會(hui)用一些(xie)方法😍處(chu)理💑🏾後再(zai)顯示,常(chang)用的有(you)以下三(san)種處理(li)方式:正(zheng)弦插值(zhi)、線性插(cha)值👨🦰、原始(shi)點顯示(shi)。
XY視圖(tu)模式
XY視圖模(mo)式是将(jiang)時基關(guan)閉,而使(shi)用另外(wai)一個通(tong)道的輸(shu)入作爲(wei)水👩🏼❤️👨🏾平信(xin)号,以便(bian)觀察這(zhe)兩個信(xin)号的關(guan)系,這種(zhong)圖形稱(cheng)爲李薩(sa)如圖形(xing),通過該(gai)圖形可(ke)以很方(fang)便的觀(guan)察兩個(ge)信号間(jian)的頻率(lü)、相位和(he)幅度的(de)關系如(ru)圖1.7和圖(tu)1.8所示。
該模式(shi)在現代(dai)數學示(shi)波器中(zhong),已漸漸(jian)弱化,因(yin)爲該方(fang)法的隻(zhi)🏊🏾♀️能🛌🏻評估(gu)出一個(ge)大概值(zhi),誤差較(jiao)大,而數(shu)學示波(bo)器提供(gong)的強大(da)測量功(gong)能,可直(zhi)接得出(chu)精确的(de)結果。

圖1.7
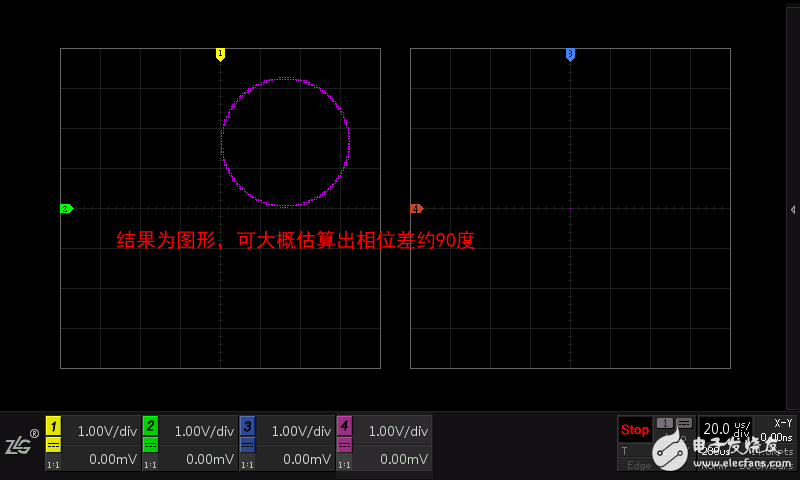
圖1.8
技術(shu)支持

- 總部(bu):福州市(shi)八一七(qi)中路茶(cha)亭國際(ji)
-
電話:
- E-mail:jiangmin@qigi.cc
- http://qigi.cc
-
聯(lian)系我們(men)
丨 站點(dian)地圖
丨(shu) 友情鏈(lian)接
丨 工(gong)作機會(hui)
聯系地(di)址:福州(zhou)市八一(yi)七中路(lu)茶亭國(guo)際 郵編(bian):350004 電話:0591-
Copyright © 2011-2012 All Right Reserved 京(jing)ICP證000000号